自動運転 - 自己位置推定
Autonomous Driving - Self-Localization
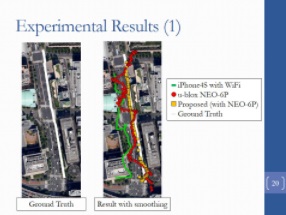
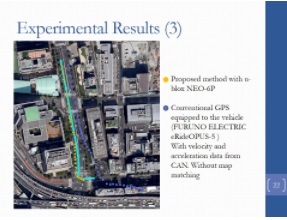
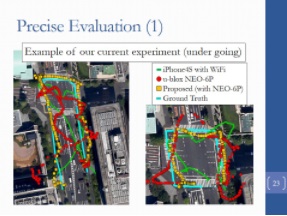
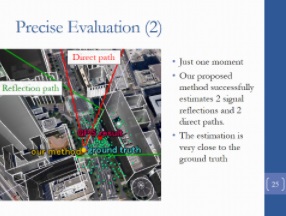
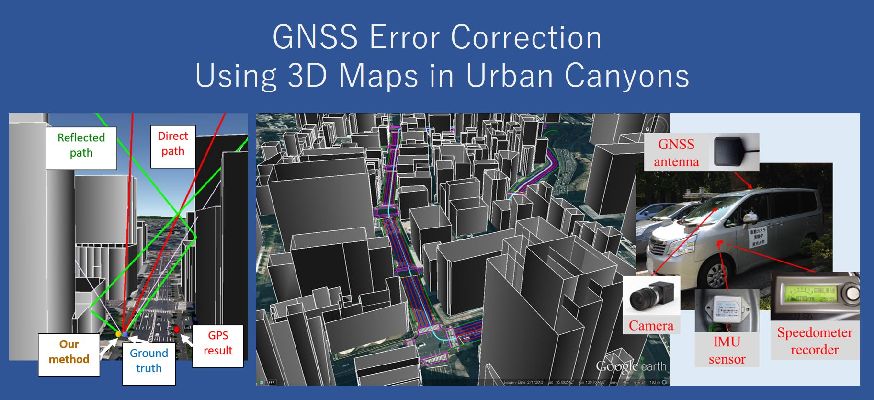
都市部における衛星測位システム(GNSS)の利用において、現在最も大きな誤差の要因となっているものはマルチパスおよびNLOS伝搬です。 マルチパスとなっている衛星を推定し測位計算から除くことによって、衛星測位の精度を高めることができます。 しかし、単純に衛星を除く場合、高層ビル街のような環境において、可視衛星数が極端に減少するという問題が生じます。 そのため当研究室では、衛星を計算から取り除くのではなく、それ自身を指標として用いて正解位置の探索を行う手法を提案しています。 3次元地図およびレイトレーシング法を用いたNLOS伝搬信号の識別および遅延誤差距離の推定手法を考案し、これをもとに探索を行っています。 今後は残っている誤差要因の究明を行っていき、更なる精度および測位率の改善を目指すことを考えています。
The accurate and reliable positions of a pedestrian are very important and useful information for statistics, advertisement, and safety applications. Although global navigation satellite systems (GNSSs) in smartphones, such as GPSs, are currently the most convenient devices to obtain the positions of pedestrians, GNSSs still have problems with their accuracy and reliability because of the performance degradation caused by multipath and non-line-of-sight (NLOS) propagation in urban canyons. This study describes an approach to estimate a position by searching around the reference position. Position assumptions are prepared around the GPS results and previous estimate. Simulated pseudoranges are calculated on the basis of a ray-tracing simulation because a receiver is at an assumed position. The proposed algorithm evaluates the similarities between the observed pseudorange set and the simulated pseudorange set and computes the confidence of every assumption. The position is determined as the weighted average of the assumptions. The proposed method was verified through field experiments in urban canyons in Tokyo.